
鉅大LARGE | 點擊量:927次 | 2018年10月17日





簡述電池測量準確度的重要性
目前這一代電動汽車依靠能量范圍介于16kWh至53kWh之間的鋰離子電池組提供動力。而僅僅一加侖汽油所包含的能量就超過了36kWh。對于電動汽車或混合動力汽車(HEV)抑或是任何的大功率電池系統來說,若要與內燃機(ICE)展開競爭就必需充分利用電池的全部儲能。為此,必須對電池組內部的每節電池進行仔細周密的監視和控制。
大功率電池組由一長串串接電池組成。電池監視器IC直接連接至每節電池,負責準確地測量每節電池的電壓。這絕不是一件簡單的工作,因為各個電池位于一個非常高電壓電池串的不同點上,而電池串很容易遭受驚人的電尖峰和電磁干擾(EMI)。電池管理系統(BMS)整合了電池電壓與電流、溫度和工作情況記錄,以連續獲知每節電池的狀況。雖然這是一項棘手的難題,但利用準確的監視和控制仍可實現電池組行車里程、可靠性和安全性的最大化。
HEV或EV中電池的預計使用期限是10~15年,而當電池失去其原始容量的80%時即被認為處于其壽命末期。通過限制工作電荷狀態(不允許電池滿充電或完全放電),可最大限度地增加電池的使用壽命和可靠性。典型的電池組工作于一個受限的范圍內,例如:20%SOC至80%SOC,其中SOC表示“電荷狀態”。這些SOC限值可根據電池的老化和工作情況(比如:高溫環境)進行調節。由于采用了此類限值,故電池組不會以滿容量地使用。例如:以20%SOC至80%SOC來運作電池組將把可用SOC限制在這60%范圍。BMS所面臨的挑戰是使每節電池盡可能接近限值運作,而不要超過限值。鋰電池在其工作范圍內表現出平坦的放電曲線,使得上述挑戰的難度進一步加大。因此,在整個工作范圍內電池電壓的變化非常之小,作為SOC計算的一部分,電池監視器必須進行非常準確的測量。
為了闡明電池測量準確度的重要性,我們來看一下簡化的鋰電池放電曲線(示于圖1)。該曲線在整個工作區內具有一個恒定的5mV/%(SOC)斜率。倘若電池電壓測量準確度欠佳,那么工作在20%至80%SOC范圍之內且具有相似放電特性的電池組將面臨嚴重的不利后果。
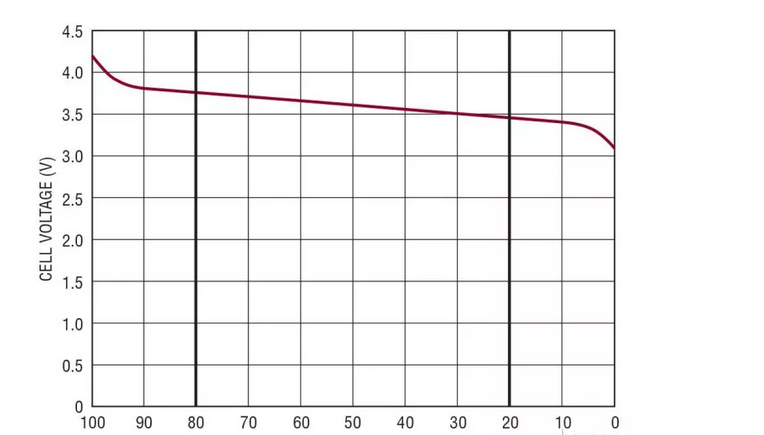
圖1:簡化的電池放電曲線
如圖2所示,倘若電池監視器具有一個±10mV的電池電壓測量誤差,則3.75V的電池電壓測量值實際上有可能對應的真實電池電壓介于3.74V和3.76V之間。這對應的實際SOC范圍為76%至80%。由于存在該測量誤差,因此必須利用一個“保護帶”對工作范圍加以限制,從而確保不超過工作限值。在本例中,必須把工作范圍限制在22%至78%的測量范圍(而不是20%至80%)。假如期望電池組保持相同的范圍,那么具有該準確度的BMS將需要額外的電池容量以補償保護帶限制。假設60%的可用SOC,則電池容量必須加大7%(注1)以補償±10mV的電池測量誤差。對于一輛使用價格3000美元的5kWh電池組(即每kWh電能的成本為600美元)的HEV來說,這將造成成本額外增加214美元。
圖2:針對±10mV電池測量誤差的保護帶要求
可以擴展該論點以凸顯針對各種不同電池測量誤差的“保護帶損失”及其與SOC范圍的相關性。如圖3所示,測量誤差僅為1mV的系統所需的額外電池容量不到1%,甚至當電池組被限制在一個25%至75%的SOC范圍(即50%的可用SOC)時也不例外。
圖3:保護帶與電池測量誤差的相關性
盡管大多數鋰電池在最初購得時通常匹配良好,但隨著時間的推移及充電循環的延續,一長串電池的SOC將出現偏差。這是由于電池特性和局部工作條件的小幅變化引起的,這會導致小的自放電和負載電流差異。為避免使任何一節電池在其SOC范圍之外運作,當SOC出現偏差時,電荷最不平衡的那幾節電池將使電池組的總工作范圍慢慢地限制。為解決這一問題,幾乎所有的電池管理系統都包括了電池電荷平衡功能電路。
采用被動平衡時,具較高SOC的電池將放電以實現所有電池SOC的歸一化。這是一種低成本的簡單平衡法。然而,它存在重大的局限性:被動平衡僅通過移除電荷來起作用。其所耗費的能量與電池電荷不平衡的幅度之間存在函數關系,并產生大量的熱量。這意味著必須保持相對較小的平衡電流,通常為電池容量的5%或以下。因此,被動平衡主要局限于離線操作,而且它需要大量的時間來完成。當SOC的變化量的增大時,被動平衡的有效性逐步下降,而且隨著時間的推移,SOC的變化將由于電池容量偏差的出現而增加。
電池會隨著其老化進程而損失容量,各節電池的老化過程會由于諸多因素的影響而存在差異,例如:電池組溫度梯度及電池制造中的波動等。當容量存在差異時,電池將更容易變至不平衡的狀態。即使只允許一節電池在SOC限制范圍以外運作,也將由于導致電池過早老化而使該問題愈發嚴重。當電池容量出現偏差時,完全依賴被動平衡會變得越來越困難。為避免受困于被動平衡的局限性,新型電池管理系統開始逐漸采取主動平衡的方法。
采用主動平衡時,電荷在電池之間移動(而不像采用被動平衡時那樣被浪費掉)。主動平衡在充電和放電周期里皆可運作。當對電池組充電時,主動平衡器可將電荷從較弱的電池移動至較強的電池。而當對電池組進行放電時,則可把電荷從較強的電池移走以補償較弱的電池。電荷通過某種高效電路(比如:反激式轉換器)進行轉移,而不是白白消耗能量。因此,發熱量受到限制、平衡電流較大、而且平衡時間顯著減少。這允許在電池組使用的過程中進行主動平衡,因而能確保從每節單獨的電池獲取最大的容量。新型IC(比如凌力爾特推出的LTC3300和LT8584)已可在汽車電池組中實現主動電荷平衡。
理想的情況是:主動平衡應在電池達到SOC范圍的末端時啟用(注2)。為闡明這一點,我們假設一個含有多節具均勻容量的電池以及一節較低容量“弱”電池的電池組。如果所有的電池都被充電至80%SOC并隨后放電,則那節弱電池的SOC將慢慢地與其余的各節電池出現偏差。BMS必須確定一個合適的點,以使平衡器能夠在其他電池繼續放電的同時將那節弱電池保持在運行狀態。圖4示出了放電周期中的SOC偏差情況,列舉了兩個例子:一個例子是一節電池的容量與電池組其余電池相差2%,而在另一個例子中則是相差8%。BMS電池測量誤差設定了一個用于確定電池之間相對狀態的限值。當SOC測量誤差為±2%(±10mV)時,在電池測量電路可靠地檢測到這一情況之前電池彼此之間的電荷失衡最大有可能達到4%。如果不具備遠遠優于±10mV的電池測量準確度,那么要在這條放電曲線的某個精確定義的點上實現一個主動平衡器幾乎將是不可能的。
測量準確度的意義并不局限于主動平衡。由該例可知,4%的SOC差異將轉化為一個超過6.6%的容量變化(注3)。對于容量下降20%之后即達到其壽命末期的汽車電池而言,這就是重大的不可恢復容量。更重要的是,電池容量的變化是反映其健康狀況的一項關鍵指標,而未察覺的容量變化則有可能是一個嚴重的問題。
當考慮這個簡單例子以外的復雜狀況時,電池測量準確度的重要性就變得更加清楚了。例如:大多數電池組都存在連續的容量變化,并具有更加細微和難以檢測的SOC偏差。而且,電池在開始放電時不太可能都處于80%SOC,因而或許會進一步掩蓋容量的變化。另外,應注意到SOC計算需要多個參數,這一點也是很重要的。這些其他參數的測量誤差并未減低對于準確電池電壓測量的要求。相反,犧牲電池測量準確度將很可能展寬電池壽命的分布。
電池監視器內部的電壓基準是測量誤差的主要決定因素。電壓基準中的任何變化都將直接導致電池測量準確度的下降。目前這一代電池監視器依靠的是帶隙電壓基準。理論上講,帶隙基準非常適合于整合到復雜的集成電路(比如:電池組監視器)之中,因為它們只需極少的芯片空間、低功率和低裕量電壓。然而,帶隙基準對于機械應力、IR回流焊和濕度很敏感,因而會導致熱遲滯和長期漂移。對于那些需要在15年以上的時間里保持非常高準確度的高精度儀表,有一種更好的選擇。最新的電池監視器(例如:凌力爾特的LTC6804)內置了一個掩埋式齊納電壓基準。掩埋式齊納電壓基準可在整個時間和工作條件下提供出色的長期穩定性和準確度。運用這種方法,LTC6804能夠保證一個低于1.2mV的電池電壓總測量誤差。
電池監視器的準確度并非限制在測量本身的準確度。必需對汽車環境中電池測量加以考慮,這里存在著大量由逆變器、執行器、開關和繼電器等所引起的電噪聲和瞬變。此類噪聲嵌入在電池信號之內,而在重視準確度的場合中必須消除該噪聲。通過在每節電池上布設一個RC濾波器可實現適度的降噪;而由于成本和電路板空間的原因,在每節電池上使用一個較高階的濾波器電路是不切實際的。通過對來自每次信號測量的多個樣本進行處理,可以消除適量的噪聲;鑒于電池數量眾多,故需將海量數據傳送至一個中央處理器,因而使得這種方法同樣不具備實用性。一種實用而有效的解決方案是消除電池監視器內部的噪聲。例如:凌力爾特的LTC6804采用了具內置三階噪聲濾波功能電路的增量-累加(ΔΣ)型ADC。這一點與寬帶SARADC是截然不同的,后者的快速采集對于被噪聲損壞的信號其數值有限(注4)。為了優化速度和降噪性能,LTC6804的ΔΣADC能采用不同的拐角頻率(范圍從27kHz至26Hz)運作。對于汽車環境而言,采用ΔΣADC的方法是相當有效的。
隨著大功率電池系統不斷地向主流產品邁進,對于電池監視電子產品的需求也將日益迫切。汽車只會提供嚴酷惡劣的使用環境,同時要求盡可能高的性能與可靠性。為了實現期望的行駛里程、可靠性和安全性,就必需周密地考慮造成性能損失的每一種不起眼的源頭。如欲獲取所有的可用電能,則需要運用諸如電池電荷主動平衡等尖端技術。此外,還需要實施盡可能準確和穩定的電池電壓測量。
注1:電池額外容量等于(0.6/0.56)–1
注2:為獲得最大效率,應在需要的時候采用主動平衡。完全保持在SOC限制范圍內的系統所需的主動平衡將遠遠少于接近限值運作的系統。
注3:對于一個22%至78%的SOC范圍(保護帶范圍),0.066=(0.04/0.60)。
注4:SAR轉換器可實現簡單的片內平均處理,但平均處理具有不良的濾波器特性。
下一篇:什么是可充電電池


















